Quadcopter Electronics Assembly Complete
June 22, 2014 • nickw
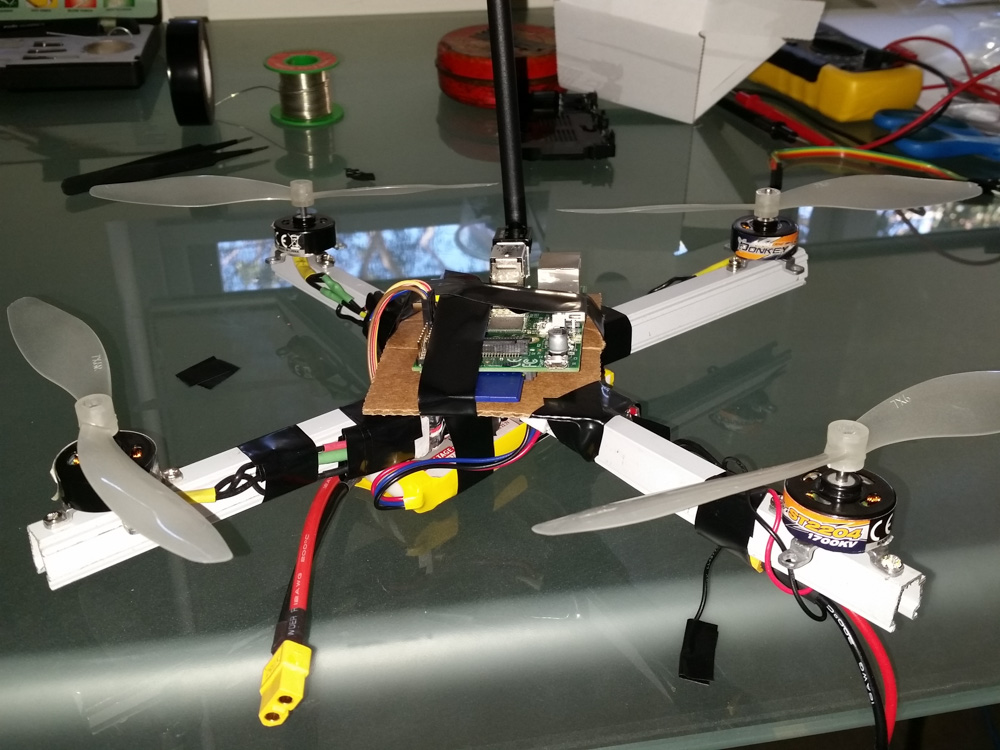
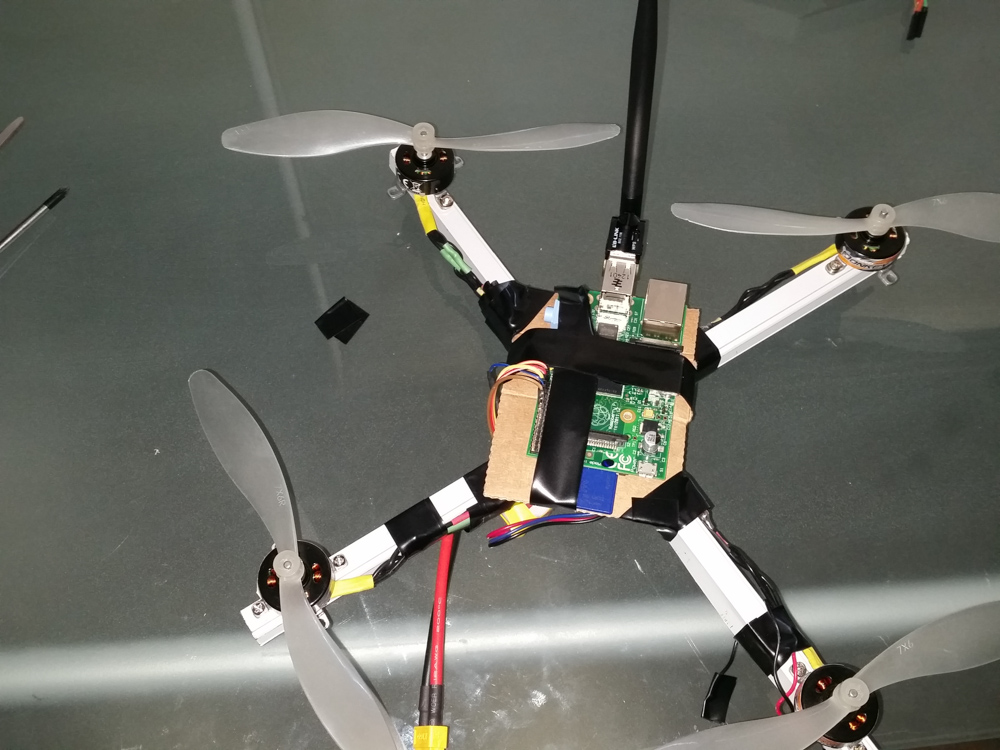
So far i’ve almost completed all the electronics components of the quadcopter. I am now waiting for my 5v regulator to arrive. I will use this to drive the Raspberry Pi from the 7.2 Lipoly battery. Once this arrives the quad will be able to become fully wireless (currently 5v power inlet is requiring a cable).
I wrote a basic program to control the PWM speeds from the RPi. This is letting me test the power that the quad has. At the moment it can easily lift off at about 40/100 (however I’m not sure if this is linear).
This video shows me bringing the controller speed up to 30/100:
The next challenge is going to be mounting everything in such a way that it’s accessible and still lightweight. At the moment electrical tape is a great mounting tool.